Hub
Robotics
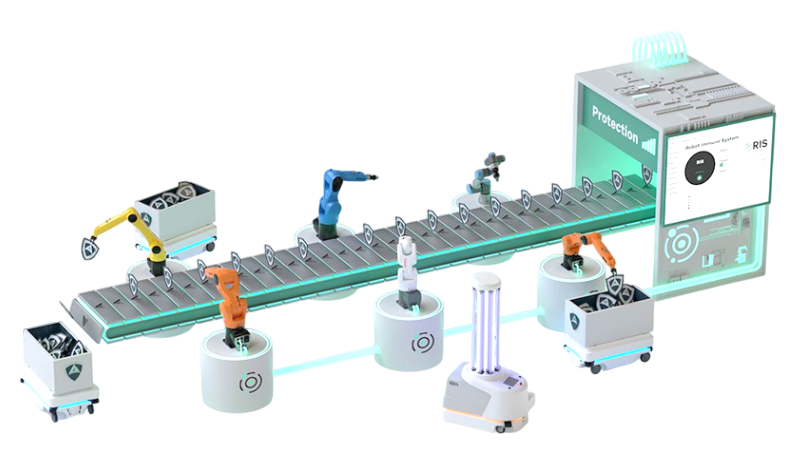
Robot cybersecurity, end to end.
Security is not a product, it is a process. Our services cover end-to-end offensive research, security certification and compliance for robots and robot components — we help you find vulnerabilities and flaws in your robots before others do.
Robots have their own networks, technologies, safety requirements and business priorities. Robots demand their own specialised cybersecurity solutions.