
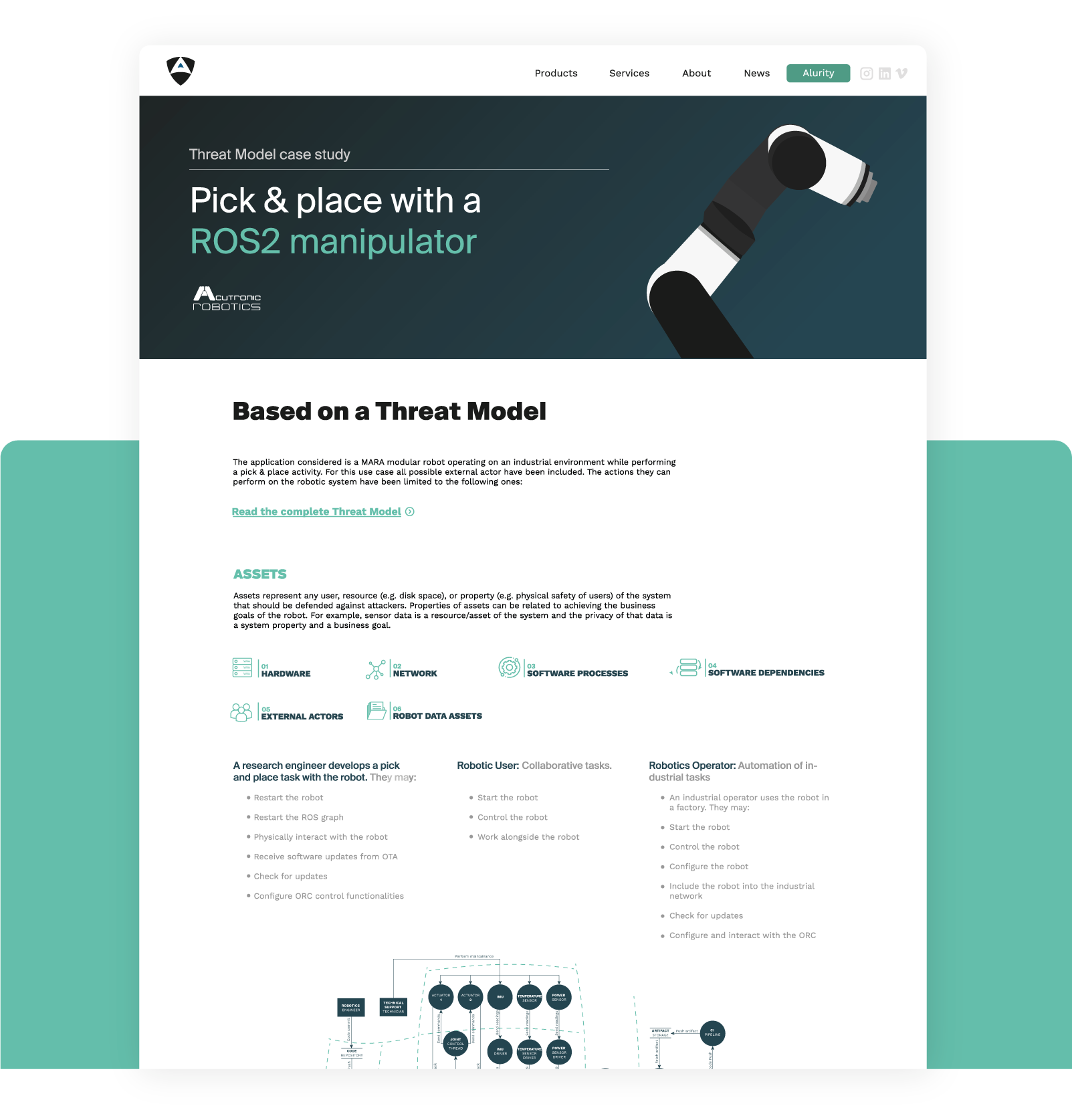
This work showcases a security threat model performed in a fully modular ROS 2 articulated robotic arm. The application considered MARA, a modular robot operating on an industrial environment while performing a pick & place activity.
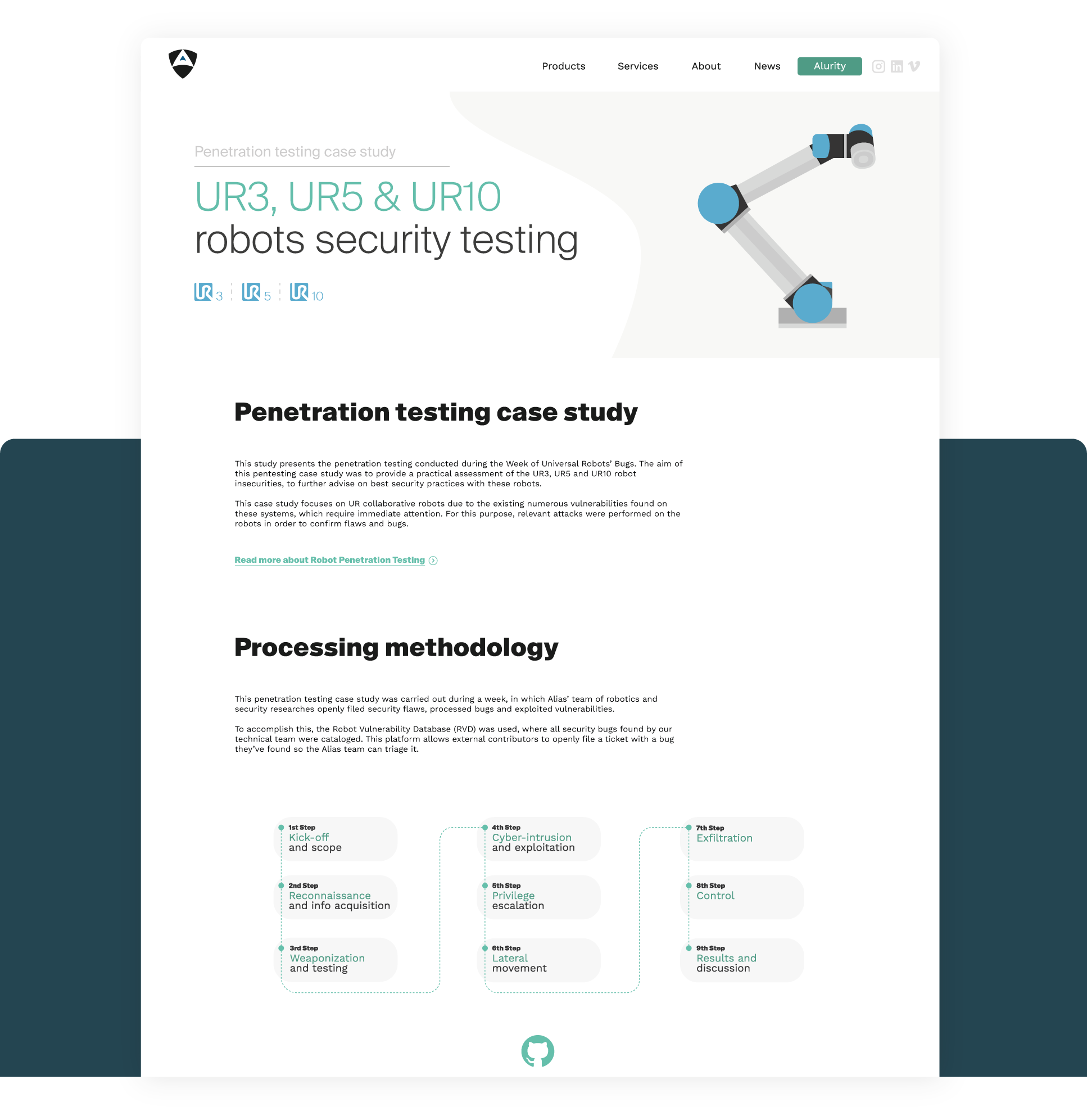
This study presents the penetration testing exercise conducted during the Week of Universal Robots’ Bugs. Our team challenged the security of these robots and developed exploits for identified vulnerabilities, across different firmware versions.
Get in touch and we will help you understand better your threat landscape.
Let's talk